

2023
Autonome Systeme (Autonomie: altgriechisch Selbstbestimmtheit) werden die Welt in der wir leben maßgeblich verändern. Sie werden Einfluss auf unser Verständnis von Mobilität, unseren Arbeitsalltag aber auch auf unser Privatleben nehmen. Autonomie bedeutet in diesem Zusammenhang, dass wir einem System Freiheitsgrade ermöglichen, in deren Rahmen es auf Basis von Informationen – aus seiner Umwelt, aus bereitgestellten oder selbst erfassten Daten – Handlungspläne entwerfen, eigene Entscheidungen treffen und verfolgen kann. Damit stellen sie den logischen nächsten Schritt nach der Erfolgsgeschichte der Automatisierung dar.
Das Portfolio an Technologien, welches für dieses intelligente Verhalten benötigt wird, kann sein Potential bei Fahrzeugsystemen unterschiedlicher Couleur in besonderem Maße entfalten. Autonome Fahrzeugsysteme, ob an Land, zu Wasser oder in der Luft, werden zukünftig in der Lage sein, sich in dynamischen Umgebungen zu orientieren und definierte Aufgaben, ohne maßgebliche Einflussnahme durch Dritte, zu erfüllen. Durch ihre Anpassungs- und Lernfähigkeit können sie schnell eingesetzt werden und auf sich ändernde Bedingungen reagieren. Erstellte Handlungspläne und getroffene Entscheidungen basieren auf einer umfangreichen Datenlage, die für Menschen in vergleichbarer Zeit nicht zu verarbeiten wäre, was die Sicherheit und Effizienz der Fahrzeugsysteme deutlich erhöhen wird. Doch heißt das, wir werden keine Interaktion mit diesen intelligenten Systemen benötigen?
Der Leitstand und seine Funktionen
Unter einem klassischen Leitstand, wie er noch heute bspw. in Kraftwerken zu finden ist, sind technische Einrichtungen zur Steuerung und Überwachung von (zumeist automatisierten) Prozessen zusammengefasst. Diese Einrichtungen basieren darauf, jeden Zustand und jeden Parameter, der relevant für den betrachteten Prozess oder eine Prozesskette ist, messen, regeln und steuern zu können. Damit ergibt sich ein komplexes Konstrukt, dass von hochqualifiziertem Personal betreut werden muss, um bei unerwünschten Abweichungen von Sollwerten angemessene Gegenmaßnahmen einleiten zu können. Im Unterschied dazu sind autonome Systeme befähigt, bei bestimmten Problemstellungen selbst zu agieren. Ist bspw. die geplante Route eines Fahrzeugsystems blockiert, führt dies nicht zwangsläufig zu einer Fehlermeldung, die eine Interaktion mit einem Nutzer zur Folge haben muss. Das Fahrzeugsystem generiert eine neue Route und führt die begonnene Aufgabe fort. Nichtsdestotrotz gibt es Funktionen, die eine spannende und mitunter notwendige Erweiterung für autonome Fahrzeugsysteme sein können. Sie greifen den Grundgedanken eines Leitstandes auf, legen die inhaltlichen Schwerpunkte jedoch neu.
Gleich bleibt das Ziel, einen bestimmten Vorgang zu überwachen und dem Operateur im Leitstand einen Überblick über relevante Parameter bereitzustellen. In unserem Verständnis ist dieser Vorgang, in Bezug auf autonome Fahrzeugsysteme, jedoch kein Prozess, sondern die Mission(en), welche das System erfüllen soll. Gleich bleibt auch die Notwendigkeit, bei Systemversagen eingreifen zu können. Ist ein Fahrzeugsystem selbst- oder fremdverschuldet havariert, braucht es Interaktionsmöglichkeiten aus der Ferne, die, angepasst an die Situation, zur Rückführung zum Normalzustand oder zumindest zur Überführung in einen sicheren Systemzustand beitragen. Eine Handlungsoption stellt in diesen Fällen beispielsweise die Übergabe der Kontrolle an den Operateur zur Teleoperation dar.
Anders als bei klassischen Leitstandsapplikationen muss eine auf den Anwendungsfall zugeschnittene Missionsplanung und -steuerung des Fahrzeugsystems ermöglicht werden. Neben der Festlegung des Missionsziels und der damit verbundenen Auswahl des geeigneten Systems, samt zusätzlicher Sensorik und Aktorik, die zur Erfüllung benötigt wird, müssen Einsatzgebiet und Zeitplanung hierbei Beachtung finden. Diese und weitere Eingaben führen wiederum zur Generierung einer Missionsübersicht, wodurch das Gesamtvorhaben mit allen wichtigen Informationen, wie der Routenplanung, der Missionsdauer oder Beschränkungen (z.B. aufgrund des Batteriestandes, hinterlegten geografischen Sperrbereichen, etc.) vorhergesagt werden kann. Für den zeitgleichen oder gar kooperativen Einsatz mehrerer Systeme, zum Beispiel bei Flotten oder Systemverbänden mit adaptivem Schwarmverhalten, gehört zu dieser Vorhersage auch die Kenntnis des Leitstandes über die jeweiligen Operationsmuster. Dazu bieten sich Simulationstools an, die einen umfassenden Einblick in die geplante Arbeitsweise des Systemverbundes erlauben und damit Vertrauen und Planungssicherheit beim Operateur erzeugen.
Nach dem Start der Mission übernimmt der Leitstand vorrangig koordinative Aufgaben. Es bietet sich in bestimmten Anwendungsfällen an, Personen oder auch andere autonome Systeme, die sich im Operationsgebiet aufhalten, über Ziel, Route und Dauer der Mission zu informieren. Für Einsätze in der Luft oder auf Gewässern muss zudem ein Austausch mit den zuständigen Behörden bzw. relevanten Institutionen hergestellt werden. Für den Operateur sind eine Fortschrittskontrolle sowie die Übergabe von Systemparametern wertvoll, um sicherzustellen, dass Abweichungen vom Plan oder unvorhergesehenes Verhalten frühzeitig detektiert und etwaige Anpassungen vorgenommen werden können.
Bei komplexeren Einsatzszenarien nehmen zudem Infrastrukturkomponenten eine zentrale Rolle ein. Während beispielsweise die Kommunikationsinfrastruktur für Vehicle-to-Infrastructure Anwendungen für den Datentransfer, für komplexe Berechnungen (durch Edge Computing) oder für Lokalisierungsaufgaben eingesetzt wird, müssen physische Hürden, wie Schleusen, Brücken oder Tore, ohne menschliche Hilfe vor Ort überwunden werden können. Auch hieraus ergeben sich Aufgaben für einen Leitstand, da er in der Lage sein muss, zu erfassen, ob alle notwendigen Infrastrukturen ordnungsgemäß funktionieren. Im Fall der Hürden ist ggf. sogar ein Fernzugriff zu implementieren, um unterstützend eingreifen zu können. Denkt man dieses Szenario weiter, ergeben sich spannende Ansätze für die Verkehrsleitzentralen der Zukunft, wobei die Steuerung und Lenkung von Verkehrsflüssen um die bevorstehende Integration von autonom agierenden Teilnehmern erweitert werden muss.
Bemerkenswert ist, dass die beschriebenen Funktionen des Leitstandes über alle Fahrzeugklassen hinweg gleichermaßen von Bedeutung sind, auch wenn sich ihre Umsetzung inhaltlich in Teilen unterscheidet. Das heißt, sowohl autonome über und unter Wasser operierende Schiffe, bodengebundene Fahrzeuge aber auch Drohnen benötigen eine Missionsplanung und -überwachung. Gleichwohl sind Havariemanagement, Integration von Infrastrukturen oder die Kommunikation mit beteiligten Stellen Querschnittsthemen, die immer mitzudenken und maßgeblich für einen sicheren Betrieb sind.
AVATUM beschäftigt sich in diesem Zusammenhang eingehend mit der Forschung und Entwicklung adäquater Funktionsmodule für autonome Fahrzeugsysteme. Wir sind davon überzeugt, dass zukünftig zahlreiche multimodale Anwendungen (u.a. autonome Logistikketten) entstehen, die von einer ganzheitlichen Steuerung und Überwachung, durch die Schaffung von Synergieeffekten, profitieren können. Aus diesem Grund arbeiten wir, über unsere Projekte hinweg, an einer modularen Plattform, die darauf ausgelegt ist, einzelne Funktionspakete jeder Fahrzeugklasse zu integrieren und zu einem multimodal arbeitendem Gesamtsystem zusammenzuführen.
Oktober
Positionspapier
Leitstände für autonome Fahrzeugsysteme

Cetero oporteat sensibus his eu. Has ex vidisse perpetua, vis partem mollis mandamus at. Ea nam legere mentitum prodesset, no quo lucilius liberavisse, te oratio debitis omittantur eos. Sea ea iusto detracto, ut scripta sapientem suavitate cum, nam deleniti perpetua intellegam an. Ei per officiis detraxit probatus, vim at graecis tincidunt.
2024
Februar
Positionspapier
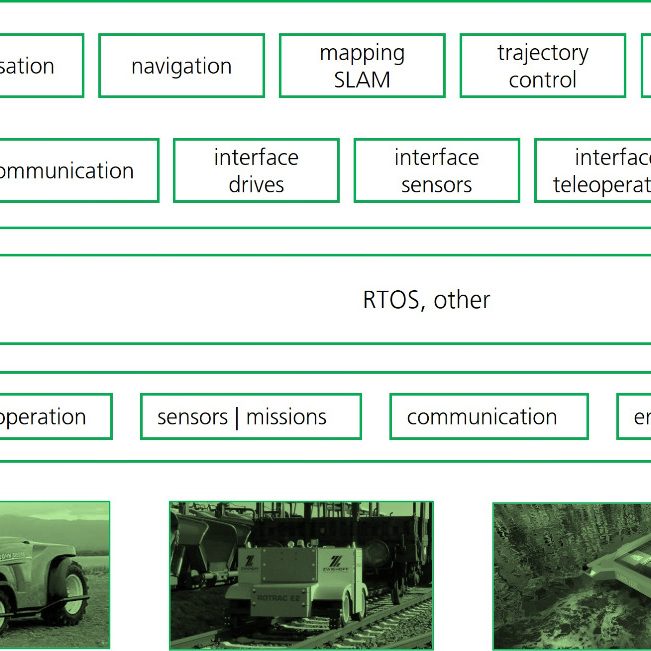
Plattform für Bordsoftware autonomer Fahrzeuge
Juni
Oktober
back to the future
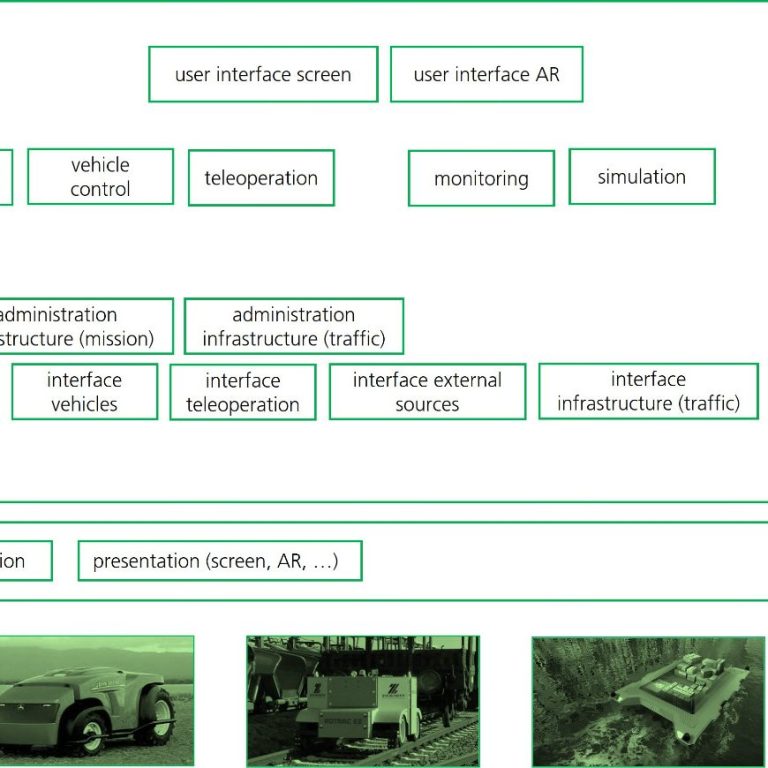
Plattform für Leitstände autonomer Fahrzeugsysteme
Positionspapier
AVATUM Reloaded
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nulla euismod condimentum felis vitae efficitur. Sed vel dictum quam, at blandit leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Nulla euismod condimentum felis vitae efficitur. Sed vel dictum quam, at blandit leo.

Seit kurzem präsentiert sich AVATUM in einem neuen Design.
Neben unserem neuen Logo fällt sicher unsere neue Unternehmensfarbe auf -wir haben uns vom "AVATUM-Blau" verabschiedet...
Im vierzehnten Jahr nach der Gründung 2011 war es richtig, die strategischen Unternehmensziele neu auszurichten und unser Erscheinungsbild jetzt entsprechend anzupassen.
Unser Kernthema seit Gründung -"Logistik und IT"- schwingt im Hintergrund weiter mit, unser Fokus liegt nun jedoch auf autonomen Fahrzeugsystemen und damit verbundenen Infrastrukturen.
Wir haben nun nicht nur ein neues Logo (Dank an unseren Partner Neonrausch aus Zeuthen), sondern auch ein komplett neues Corporate Design, welches den innovativen und zukunftsorientierten Charakter des Unternehmens nachhaltig zur Geltung bringt.
Dazu gehört jetzt auch ein "eyecatcher": Dracaena - der Drachenbaum.
Dracaena leitet sich vom altgriechischen δράκαινα drákaina -weiblicher Drache ab.
Wenn Sie mit der Drachenkunde vertraut sind, dann wissen Sie, dass der Drache als Symbol für Wachsamkeit, Logik, Dialektik, Klugheit und Stärke steht -wir finden, das passt sehr gut zu unseren Themen- und Aufgabenfeldern...
Unsere neue Unternehmensfarbe ist ein modernes ansprechendes Blaugrün, diverse grafische Elemente dienen als optische Anker mit Wiedererkennungswert.
Im Zuge der Einführung des neuen Designs wurde auch die AVATUM-Webseite einem Relaunch unterzogen, der noch nicht vollständig abgeschlossen ist -lassen Sie sich in den kommenden Wochen mit weiteren Inhalten überraschen.
Zu unserer neuen Kommunikationsstrategie gehört auch, dass wir zukünftig soziale Medien deutlich mehr in den Fokus nehmen werden, um Ihnen auf diese Weise schnell und unkompliziert Informationen über unsere Aktivitäten zur Verfügung zu stellen.
2025
März
AVATUM präsentiert sich in neuem Look

©Urheberrecht. Alle Rechte vorbehalten.
Wir benötigen Ihre Zustimmung zum Laden der Übersetzungen
Wir nutzen einen Drittanbieter-Service, um den Inhalt der Website zu übersetzen, der möglicherweise Daten über Ihre Aktivitäten sammelt. Bitte überprüfen Sie die Details in der Datenschutzerklärung und akzeptieren Sie den Dienst, um die Übersetzungen zu sehen.