
hier bieten wir Ihnen eine Auswahl konkreter Projekte, in denen unsere Mitarbeiter erfolgreich gearbeitet und für Sie und Ihre Aufgaben nutzbringende Erfahrungen gesammelt haben ...
Personenstrom-analyse und -lenkung
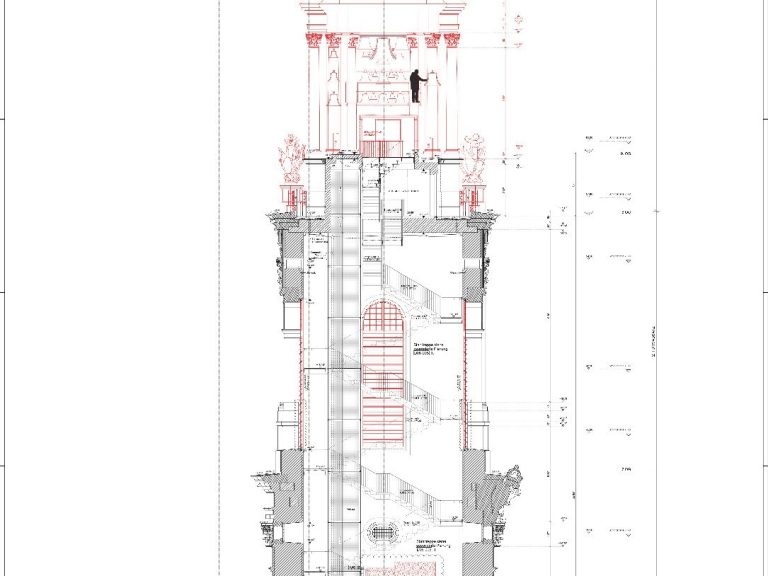
In der Verantwortung der Stiftung Garnisonkirche Potsdam wurde der Turm der Garnisonkirche Potsdam nach historischem Vorbild neu errichtet und 2024 für Besucher geöffnet.
Bereits in der Planungsphase war davon auszugehen, dass das Bauwerk zu einem wichtigen Besuchermagnet avancieren würde. Besonders die barrierefrei über Aufzüge zu erreichende Aussichtsplattform würde einen großen Zustrom von Besuchern induzieren -die Stiftung ging in ihren Planungen von etwa 160.000 Besuchern jährlich aus.
Die Analyse räumlicher, (sicherheits)technischer und organisatorischer Limitierungen, und das darauf aufsetzende Lenkungskonzept (Organisation und Technik) haben zu einer sicheren Führung der Personenströme in dem Gebäude bei einer gleichzeitig hohen Erlebnisqualität geführt.
Ein vergleichbares Projekt wurde für den seeseitigen Zugang über Aufzüge zur Stadt Valetta (Malta) durchgeführt.
Eine Personenstromlenkung wurde ebenfalls für den FIFA-Austragungsort St. Petersburg unter Berücksichtigung der entsprechenden Regularien der FIFA konzipiert.

KI-gestützte Navigation und Steuerung für Boote


Detektion schnell bewegter Objekte
KI im Agrarsektor
UGV im RoRo-Hafen
Die Suche nach zu verladenden Trailern auf Stauflächen für den RoRo-Verkehr ist zeitaufwändig und hat Kosten sowohl für die Suchverkehre mit Terminal-Zugmaschinen (tugmaster) als auch im Falle verspäteter Abfahrten der Schiffe zur Folge.
Die Aufgabe bestand darin, ein unbemanntes Bodenfahrzeug (UGV - Unmanned Ground Vehicle) zur autonomen Operation auf einem Terminal zu ertüchtigen und das Fahrzeug so auszustatten, dass es eigenständig abgestellte Trailer detektieren und und anhand ihres Trailerkennzeichens identifizieren kann. Die Position des erkannten Trailers wird automatisch an ein Hafenmanagementsystem übermittelt.
An Bord des Fahrzeuges sind KI-Module zur Navigation (Umgebungserkennung inkl. Bodenverkehr) sowie zur Detektion der Trailer, ihrer Kennzeichenposition und zur Kennzeichenerkennung implementiert. Zum System gehört ein Leitstand, über den unterschiedliche Suchmissionen ausgelöst und in Havariefällen interveniert werden kann. Er bildet auch das Kommunikationsgateway zum Hafenmanagementsystem.

POC - UGV zur Infrastrukturkontrolle
Drohnen, KI und offroad-Fahrzeuge

Drohnenschwarm
zur Überwachung

Potsdam, Valetta
F&E Defense
Im Rahmen dieses industriegetriebenen Entwicklungsvorhabens wurde ein Forschungsboot mit unterschiedlichen Sensoren (Tageslichtkameras, Thermalkameras, LIDAR, Sonar, AIS) ausgestattet, um mittels Sensordatenfusion eine vollständige Wahrnehmung der Umgebung -einschließlich des umgebenden Schiffsverkehrs- zu ermöglichen.
Darauf aufsetzend wurde eine KI- und MPC-basierte Steuerung entwickelt, die das Wasserfahrzeug in die Lage versetzt, ein vorgegebenes Ziel auf einer Binnenwasserstraße unter Berücksichtigung der geltenden Verkehrsregeln zu erreichen.
MPC (Model Predictive Control) verwendet ein zeitdiskretes dynamisches Modell des zu regelnden Prozesses, um sein zukünftiges Verhalten in Abhängigkeit von Eingangs-, Ausgangs- und Zustandsbeschränkungen zu berechnen.
Die erforderliche Rechenleistung an Bord wurde mit einem NVIDIA Jetson AGX bereitgestellt.
Trailersuche mit autonomen Fahrzeug
Eisenbahnindustrie
Klassifikation von Ernte-stückgut

kooperative Drohnen
F&E Spezialeinsatzkräfte
Zur Unterstützung von Spezialeinsatzkräften wurde ein System entwickelt, welches das eingreifende Team bei der Exploration unbekannter Gebäude unterstützt.
Das System besteht aus zwei Drohnen und einer ground-station (Leitstand). Eine Drohne operiert autonom innerhalb das Gebäudes, während die zweite das Gebäude von aussen erfasst -beide Flugsysteme arbeiten synchron, sodass ein umfassendes Lagebild (wo sind wieviele Personen im Gebäude) erstellt werden kann.
Ein zusätzliches KI-Modul wurde zur Detektion und Klassifikation von Objekten (z.B. Waffen) implementiert.
Die Aufgabenstellung in diesem Projekt bestand darin, ein KI-Modul bereitzustellen, um Achsen bzw. Waggons schnell vorbeifahrender Züge anhand akustischer Signaturen zu detektieren und zu zählen.
Das neuronale Netz wurde anhand einer sehr großen Akustikdatenbank des Eisenbahn-Bundesamtes (EBA) trainiert. Auf der Basis von Akustikdaten, die mit einem Smartphone erfasst wurden, konnte eine Detektionsrate für Achsen von etwa 90% und für Waggons von über 90% erzielt werden.
Die Zielstellung dieses Projektes bestand darin, einen Schwarm* von unbemannten Luftfahrzeugen (Drohnen) für autonome Überwachungsmissionen zu ertüchtigen.
Über einen Leitstand erfolgt neben der Missionplanung (in welchem Gebiet ist welche Aufgabe zu lösen) auch die Schwarmkonfiguration bei der festgelegt wird, wieviele Fahrzeuge in welcher Formation (z.B. Delta, Linie) beteiligt sein sollen. Die Luftfahrzeuge halten während der Operation die Formation auch dann bei, falls ein oder mehrere Schwarmelemente einem Hindernis ausweichen müssen. Dazu wurde von einem am Projekt beteiligten Forschungsinstitut eine UWB**-basierte Lokalisierungs- und Kommunikationskomponente entwickelt, auf deren Basis die Drohnen vorgegebene Abstände (Schwarmkonfiguration) untereinander einhalten und koordinierende Daten austauschen können.
*zur Definition eines Schwarms hier ein interessanter Artikel: www.japcc.org/articles/defining-the-swarm/
Im Projekt wurde von mehr als sechs Drohnen ausgegangen.
**UWB - Ultra Wide Band
Es wurde ein KI-Modul entwickelt, dass stückiges Erntegut (hier: Gurken) während des laufenden Ernteprozesses bereits auf dem Erntefahrzeug ("Gurkenflieger") in Echtzeit klassifiziert und aus den Ergebnissen Steuervorgaben für eine automatische Sortiereinrichtung auf dem Fahrzeug generiert. Zur Objektdetektion und -klassifikation wurde ein einfaches Tageslichtkamerasystem eingesetzt.
F&E Defense
Kooperation Drohnen und Schwerlastfahrzeuge
Hochautomatisiertes Fahren ist mittlerweile auch bei Schwerlastfahrzeugen ein Thema, wie bei dem im Bild gezeigten "Tara" von VOLVO. Diese Fahrzeuge werden z.B. in Steinbrüchen oder Minen zum Transport eingesetzt.
Die Entwicklungsaufgabe bestand darin, ein UVS* zu entwickeln, das KI-basiert
- im Zuge einer Intrusion Detection und Lagebilderzeugung Objekte (Personen, Tiere, Fahrzeuge) detektiert, klassifiziert und verfolgt,
- selbst kleine Hindernisse auf den Fahrwegen der Schwerlastfahrzeuge detektiert, klassifiziert und diese an die Fahrzeuge kommuniziert,
- die Fahrzeugoperationen überwacht,
- Daten für einen digitalen Zwilling des Operationsgebietes erfasst (siehe 3D-Bild).
Der Fahrzeughersteller VOLVO und der Minenbetreiber STRABAG waren -neben anderen- an dem Vorhaben beteiligt.
*UVS - Unmanned Aerial System
(Copyright Bild Fahrzeug: VOLVO)
Flughafenbetreiber

Ziel des Vorhabens war, die wirtschaftliche und technische Machbarkeit einer Kontrolle der luftseitigen Verkehrsflächen an einem Flughafen mit einem autonom operierenden Oberflächenfahrzeug zu prüfen.
Zur Risikominimierung für den Betrieb wurde ein zweistufiges Konzept entwickelt:
In einer ersten Stufe sind teleoperierte Aktionen vorgesehen, die einerseits dem Erkenntnisgewinn (wo sind welche Risiken zu erwarten) und andererseits der Datengewinnung (für das KI-Training zur zweiten Stufe) dienen.
In der zweiten Ausbaustufe ist der autonome Betrieb eines Fahrzeugs bzw. mehrerer Fahrzeuge vorgesehen; der in der ersten Stufe zur Teleoperation genutzte Leitstand ist dann zur Missionsplanung und für Intervention in Havariefällen vorgesehen.
Der Implementierung gingen Simulationsexperimente zum Nachweis der Wirtschaftlichkeit (Anylogic) sowie zur Bestätigung der technischen Umsetzbarkeit (Gazebo) voraus.
©Urheberrecht. Alle Rechte vorbehalten.
Wir benötigen Ihre Zustimmung zum Laden der Übersetzungen
Wir nutzen einen Drittanbieter-Service, um den Inhalt der Website zu übersetzen, der möglicherweise Daten über Ihre Aktivitäten sammelt. Bitte überprüfen Sie die Details in der Datenschutzerklärung und akzeptieren Sie den Dienst, um die Übersetzungen zu sehen.